Smooth and rapid alignment between as-designed vs. as-built 3D entities
Since the topic of as-designed vs. as-built differences checking is of high relevance for many manufacturing branches, Open Cascade comes with an efficient solution — BestFit algorithm. It is a proprietary developed SDK, which addresses to and effectively manages the task of finding the proper position of a point cloud resulted from laser scanning and the corresponding ‘nominal’ CAD model. Such a solution will be an indispensable tool in the filed of Computer Aided Inspection, where precise dimensions and material consistency are the top priorities.
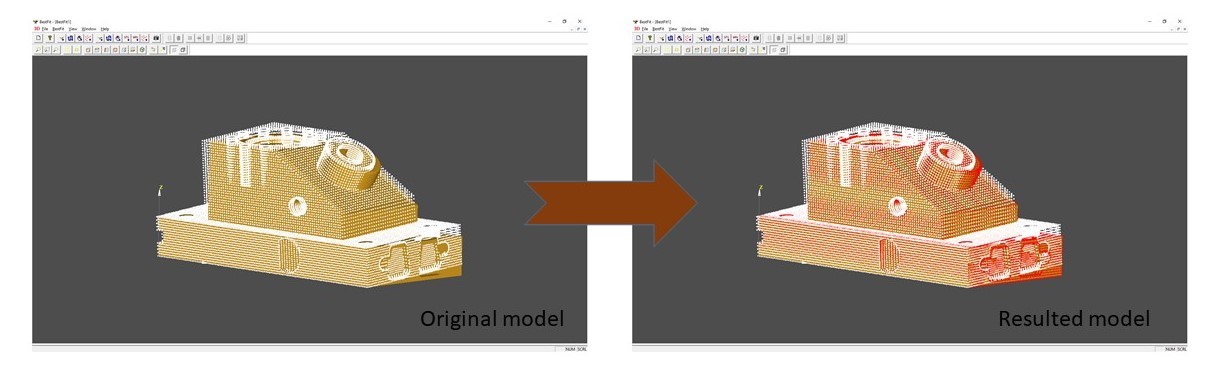
To determine where deviations between the CAD model and 3D laser scan exist, the two entities need to be aligned and correct matching to be verified.
Best Fit Algorithm processes input datasets in three steps:
- Calculates and makes registration of the deviation of each input point from the nominal shape.
- Computes the error function evaluating the deviation of the initial set of points from the nominal shape, basing on calculated deviation at each point and its known dependency on transformation parameters.
- Solves the optimization problem to find the best-fit transformation.
The output of this algorithm is a transformation matrix — translation & rotation — that should be applied to the point cloud in order to put them into the best-fit position according to the CAD model.
Benefits:
- On-site dimensional comparison and inspection of manufactured part and its digital prototype
- Considerable time-saving on quality control tasks
- Enhanced efficiency of inspected results
- Advance diagnosing and preventing of manufacturing and assembly issues