

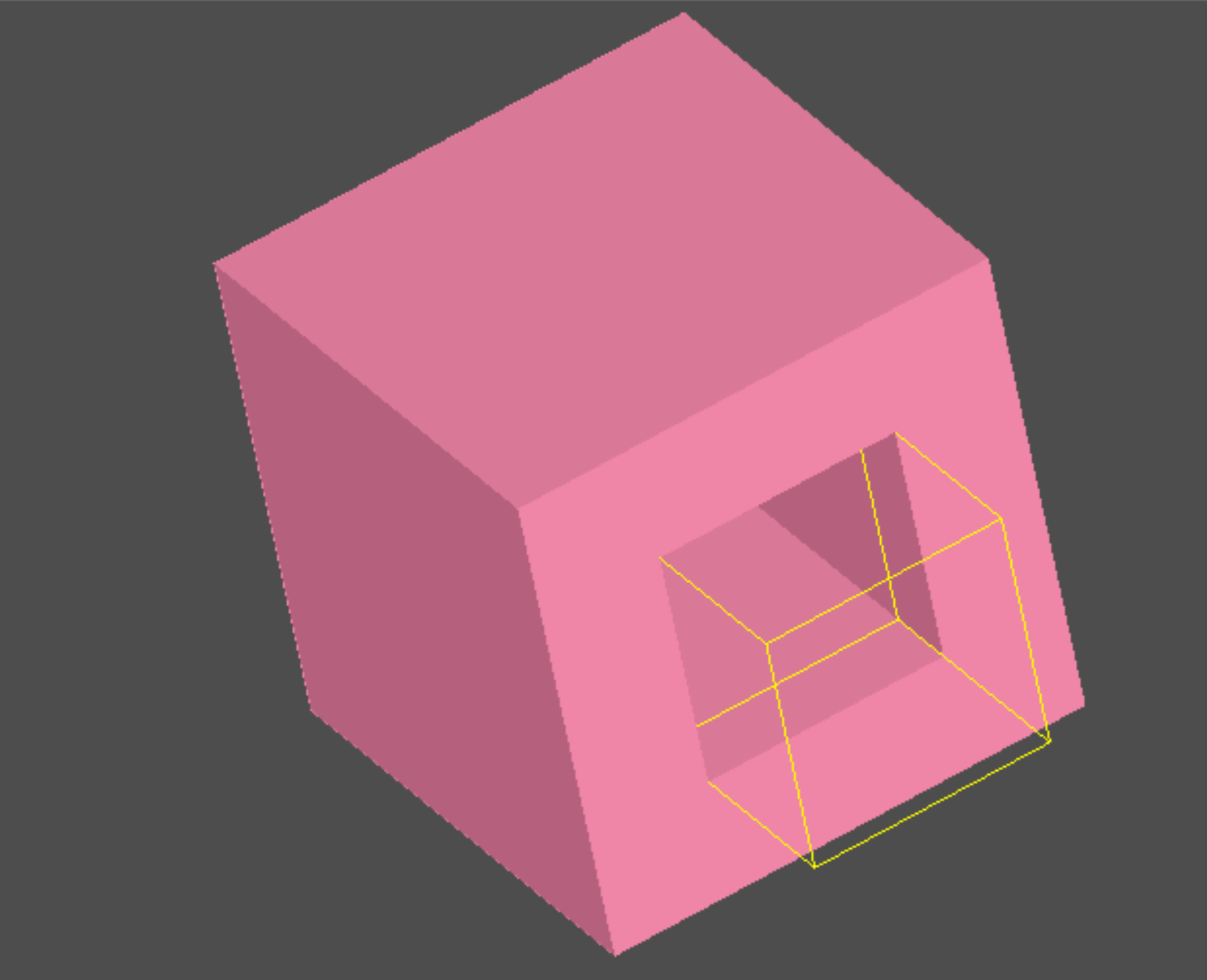
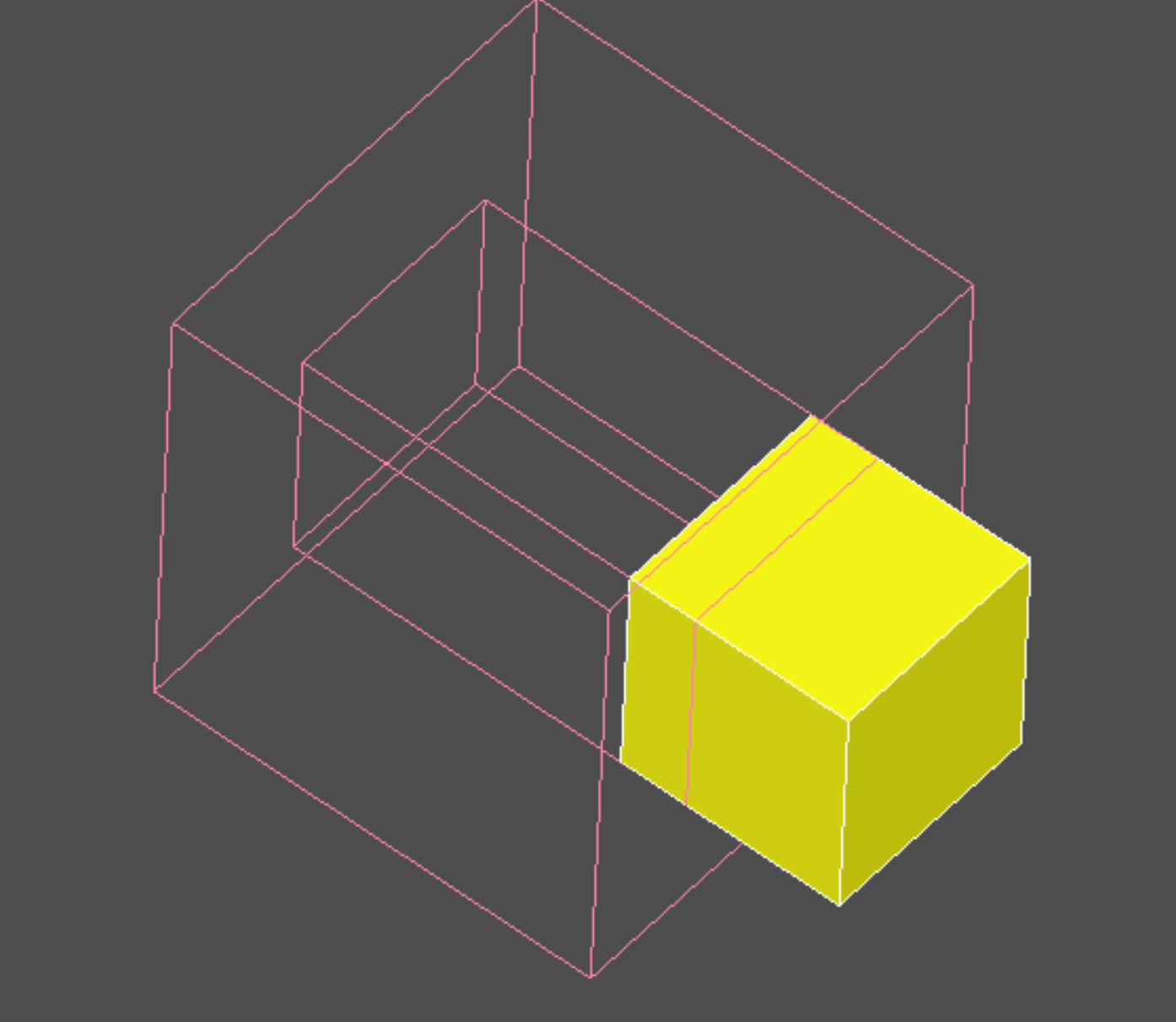
Tue, 07/31/2018 - 14:20
//Here we have the collision detection code for two part STEP assembly
// read step assembly
STEPControl_Reader reader;
reader.ReadFile("C:/Users/Desktop/assembly.STEP");
reader.TransferRoot();
Standard_Integer aCount = reader.NbRootsForTransfer();
Handle(TColStd_HSequenceOfTransient) list = reader.GiveList();
TopoDS_Shape STEPshape = reader.OneShape();
// split step part into seperate solids
TopTools_IndexedMapOfShape mapOfShapes;
TopExp::MapShapes(STEPshape, TopAbs_SOLID, mapOfShapes);
std::cout << mapOfShapes.Extent() << " solids found in STEP file." << std::endl;
// solid to shapes
TopoDS_Solid solid1 = TopoDS::Solid(mapOfShapes.FindKey(1));
TopoDS_Solid solid2 = TopoDS::Solid(mapOfShapes.FindKey(2));
// making mesh for the 2 shapes to prepare the shapes for proximity test
const Standard_Real aLinearDeflection = 0.01;
const Standard_Real anAngularDeflection = 0.01;
BRepMesh_IncrementalMesh aMesh1(shape1, aLinearDeflection, Standard_False, anAngularDeflection);
BRepMesh_IncrementalMesh aMesh2(shape2, aLinearDeflection, Standard_False, anAngularDeflection);
TopoDS_Compound compound;
BRep_Builder aBuilder;
aBuilder.MakeCompound(compound);
aBuilder.Add(compound, shape1);
TopoDS_Compound compound2;
BRep_Builder aBuilder2;
aBuilder2.MakeCompound(compound2);
aBuilder2.Add(compound2, shape2);
Standard_Boolean done = 0;
//Perform proximity test
BRepExtrema_ShapeProximity proximity(compound, compound2, 0.001);
proximity.Perform();
// initializing compound for store collision faces
TopoDS_Builder aCompBuilder;
TopoDS_Compound CollisionFaceCompound;
aCompBuilder.MakeCompound(CollisionFaceCompound);
// if proximity test is successful
if (proximity.IsDone())
{
// gives collision collision face and edges of shape1
for (BRepExtrema_MapOfIntegerPackedMapOfInteger::Iterator
anIt1(proximity.OverlapSubShapes1()); anIt1.More(); anIt1.Next())
{
const TopoDS_Face& aFace1 = proximity.GetSubShape1(anIt1.Key());
TopoDS_Shape F1 = aFace1;
// gives collision collision face and as well as edges of shape2, so we use BRepAlgoAPI_Common to //take common faces alone
for (BRepExtrema_MapOfIntegerPackedMapOfInteger::Iterator anIt2(proximity.OverlapSubShapes2()); anIt2.More(); anIt2.Next())
{
const TopoDS_Face& aFace2 = proximity.GetSubShape2(anIt2.Key());
/// int this step we take 1st shape's collision face is in "aFace1" and compare with all the collision ///faces of second shape
//and BRepAlgoAPI_Common return exact collision faces
TopoDS_Shape S1 = BRepAlgoAPI_Common(aFace1, aFace2);
aCompBuilder.Add(CollisionFaceCompound, S1);
}
}
}
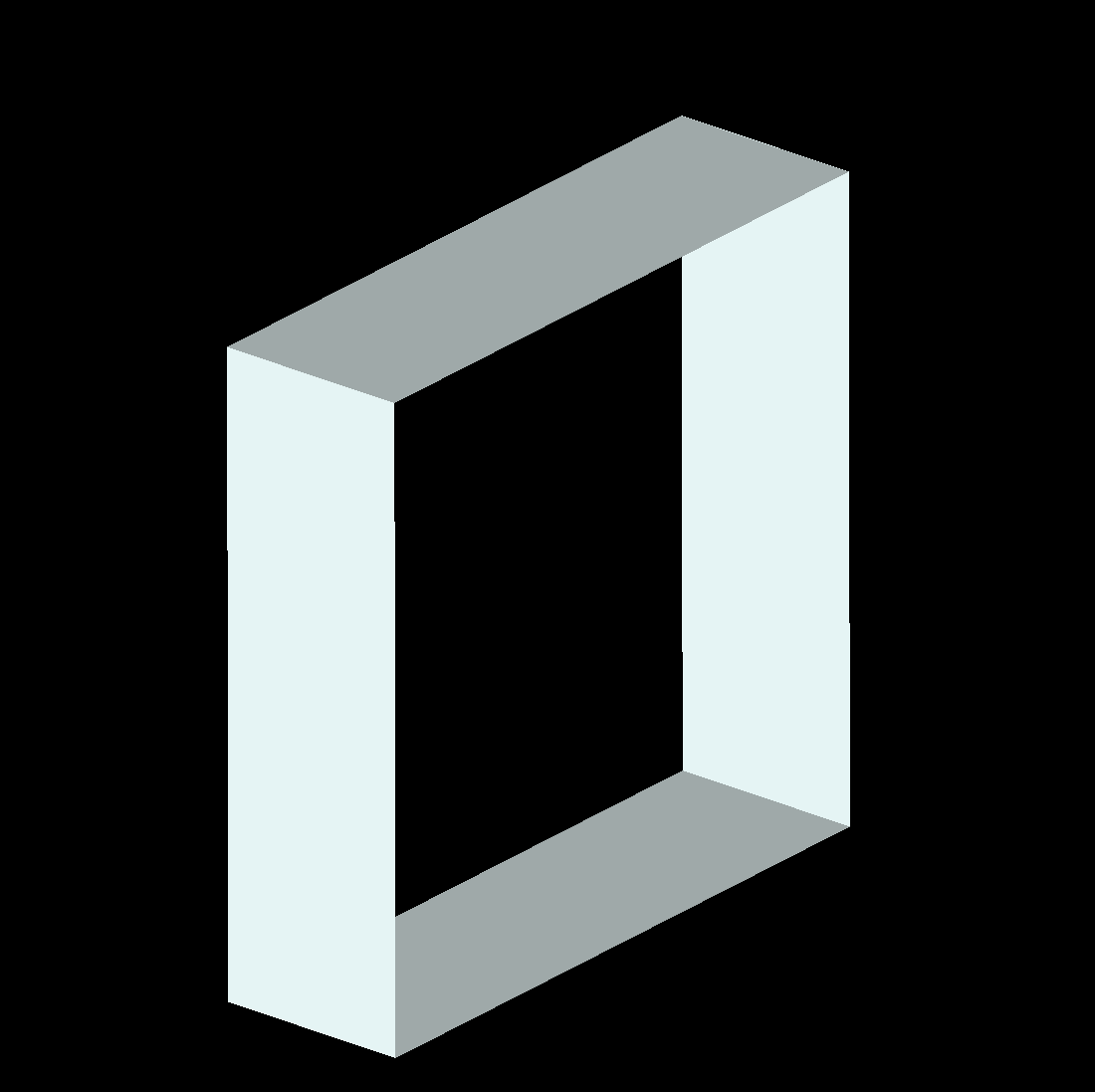
//// TopoDS_Shape S1 has exact faces of collision face of the 2 parts step assembly
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}